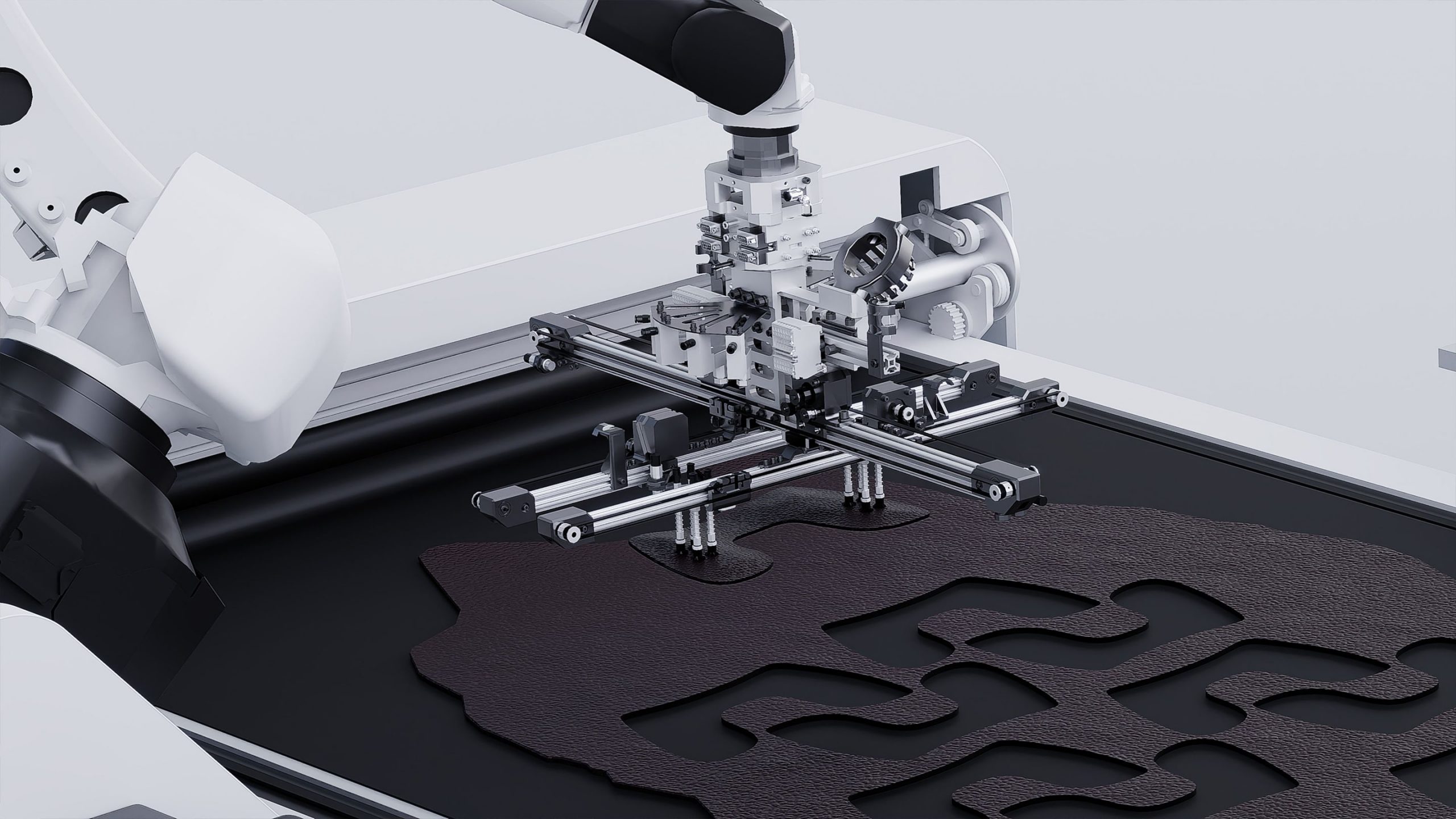
Carretéis com peles são movidos para o local de implantação com a ajuda de robôs móveis. Carretéis com películas são retirados de um robô móvel com o pick-and-placer e colocados na célula de corte e coleta. Com a ajuda do carrinho, o filme com a pele é desenrolado na superfície da mesa de vácuo da célula de corte e coleta. Ao ligar a bomba de vácuo, a pele filmada é pressionada contra a mesa de vácuo, eliminando irregularidades e beliscões.
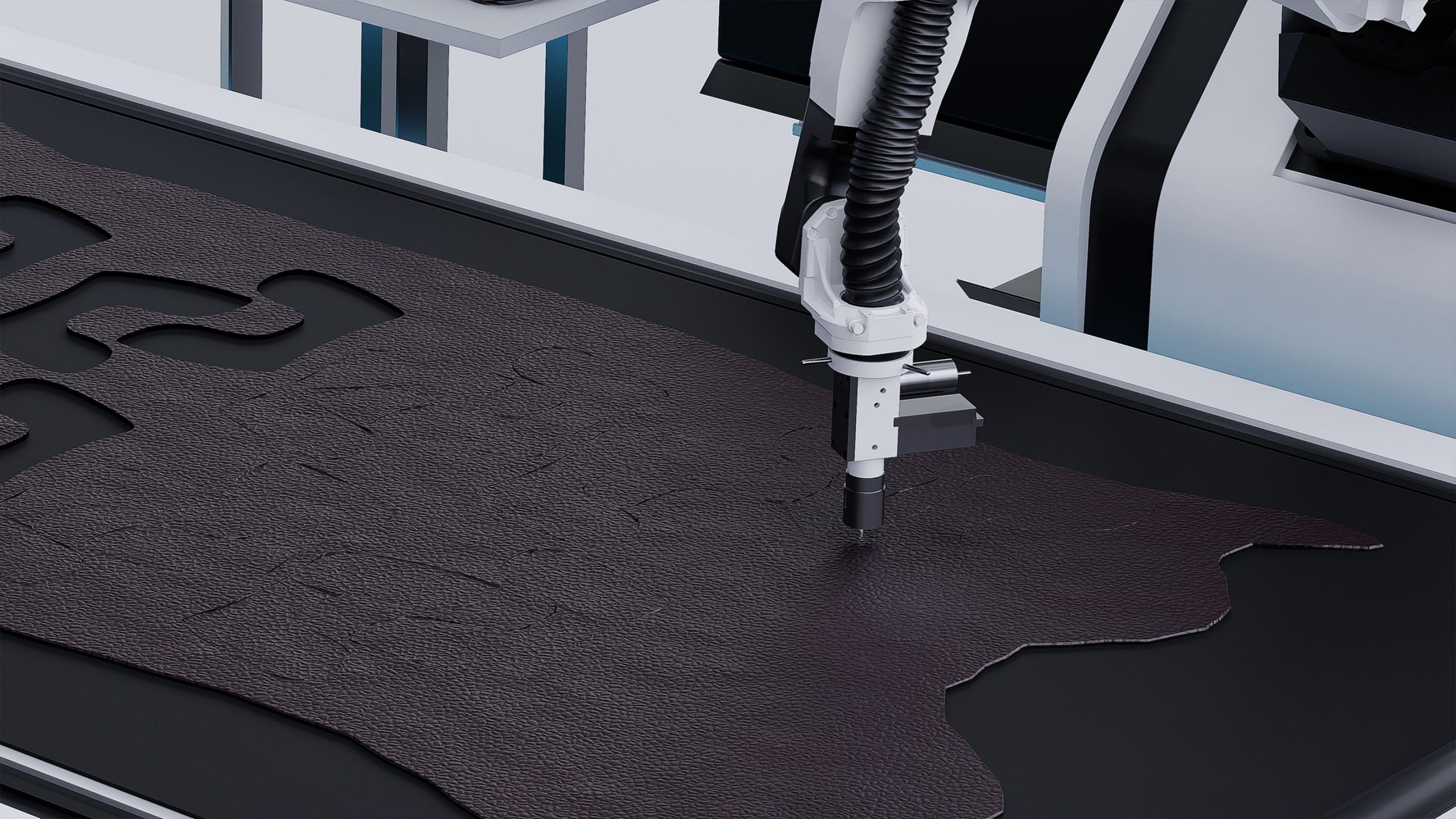
Os robôs com a ferramenta de faca conduzem o corte junto com um programa gerado antecipadamente, de acordo com as tarefas que chegam ao servidor da célula do PLM via MES.
Após os robôs de corte, pinças coletam as peças em pontos definidos por MES. Os robôs formam pequenos lotes e os colocam em um robô móvel, equipado com a “plataforma”, para transportar as peças a um depósito ou a próxima célula.